Abstrak
Sebagai pengganti governor dalam upaya menjaga mutu/kualitas daya listrik sistem PLTMh, dua dekade terakhir ini mulai dikembangkan beberapa alat Pengatur Beban Elektronis (Electronic Load Controllers). Pada sistem PLTMh, Electronic Load Controller (ELC) merupakan alat untuk mengatur keseimbangan beban utama dan ballast load yang diharapkan sistem PLTMh tersebut bisa selalu terjaga pada kondisi beban relatif konstan. Dengan mengoperasikan sistem PLTMh pada beban relatif konstan, maka akan membuat generator berputar pada putaran yang relatif konstan pula, sehingga dengan demikian tegangan dan frekuensi sistem pun akan ikut konstan tidak terpengaruh oleh perubahan pemakaian beban utama yang kondisinya tidak menentu. Mikrokontroler AT89S51 yang merupakan keluarga MCS-51 mempunyai aplikasi yang sangat luas. Dengan memanfaatkan mikrokontroler AT89S51 sebagai pengendali utama (main controller) ELC, maka rangkaian ELC menjadi cukup sederhana. AT89S51 yang diaplikasikan sebagai pencacah siklus listrik sistem, mikrokontroler cukup membutuhkan tambahan rangkaian Zero Crossing Detector sebagai pengubah isyarat sinusiodal menjadi persegi dan Thyristor atau Kontaktor sebagai komponen switching ballast load. ELC mampu mengendalikan ballast load sesuai dengan kapasitas sistem PLTMh dengan menggunakan komponen switching yang sesuai. Sebagai sebuah penenelitian, maka dalam pembuatan pengatur beban elektronis ini, ELC adalah ELC 1 fase dan hanya berkapasitas 5 kW
Kata kunci: PLTMh, ELC, Ballast load
1. Pendahuluan
Disaat hangat-hangatnya isu berkenaan dengan krisis energi listrik nasional, global warming dan climate changes sekarang ini, keberadaan Pembangkit Listrik Tenaga Mikrohidro (PLTMh) sepertinya menjadi salah satu solusi alternatif dari beberapa solusi yang ada. Terutama untuk daerah-daerah yang masih disuplai dengan listrik tenaga diesel dan lebih khusus untuk desa/daerah-daerah terpencil yang belum mendapat pelayanan aliran listrik karena sulit dicapai oleh jaringan listrik yang pembangkitnya berada jauh dari pedesaan (remote area). Didukung dengan potensi kelistrikan tenaga air di Nusantara yang mencapai 72.000 MW, 10 persennya atau 7.500 MW, dapat dimanfaatkan untuk sistem PLTMh [6]. Sistem PLTMh yang sudah terkenal ramah lingkungan, kemampuan menghasilkan listrik yang kontinyu (siang-malam) dan juga ketersediaan teknologi yang terjamin serta kokoh mampu berumur 20 sampai 30 tahun, sangat menarik sebagai sumber energi listrik mandiri terbarukan [1]
Disaat hangat-hangatnya isu berkenaan dengan krisis energi listrik nasional, global warming dan climate changes sekarang ini, keberadaan Pembangkit Listrik Tenaga Mikrohidro (PLTMh) sepertinya menjadi salah satu solusi alternatif dari beberapa solusi yang ada. Terutama untuk daerah-daerah yang masih disuplai dengan listrik tenaga diesel dan lebih khusus untuk desa/daerah-daerah terpencil yang belum mendapat pelayanan aliran listrik karena sulit dicapai oleh jaringan listrik yang pembangkitnya berada jauh dari pedesaan (remote area). Didukung dengan potensi kelistrikan tenaga air di Nusantara yang mencapai 72.000 MW, 10 persennya atau 7.500 MW, dapat dimanfaatkan untuk sistem PLTMh [6]. Sistem PLTMh yang sudah terkenal ramah lingkungan, kemampuan menghasilkan listrik yang kontinyu (siang-malam) dan juga ketersediaan teknologi yang terjamin serta kokoh mampu berumur 20 sampai 30 tahun, sangat menarik sebagai sumber energi listrik mandiri terbarukan [1]
Sayangnya dari beberapa kelebihan yang dimiliki sistem PLTMh tersebut, sampai sekarang ini teknologi PLTMh di masyarakat masih kurang familier, sehingga pertumbuhannya pun menjadi lambat. Dari potensi kelistrikan tenaga air di Indonesia yang mencapai 75.000 MW tersebut, pada pertengahan tahun 2008 ini, baru terdapat sekitar 60 unit sistem PLTMh yang tersebar di 60 wilayah Indonesia [6]. Terlebih lagi pembangunan sistem PLTMh yang sudah dilakukan, masih sering mengabaikan mutu/kualitas daya listrik (power quality) yang dihasilkannya. Mutu/kualitas daya listrik yang biasanya dikaitkan dengan perubahan tegangan, frekuensi dan pergeseran fase jika PLTMh merupakan sistem tiga fase sangat penting untuk diperhatikan. Kualitas daya listrik yang jelek secara signifikan akan berdampak pada umur/usia peralatan, baik peralatan beban sistem maupun peralatan (komponen) sistem PLTMh itu sendiri [1].
Teknik yang digunakan untuk menjaga kualitas daya listrik setiap sistem pembangkit berbeda-beda, dan demikian pula dengan sistem PLTMh. Pada sistem PLTMh tidak menggunakan governor (pengatur kecepatan putaran turbin/penggerak mula) yang digunakan untuk menyesuaikan atau menyeimbangkan energi pada penggerak mula dengan kebutuhan pemakaian beban konsumen. Teknik yang digunakan pada sistem PLTMh adalah dengan menerapkan sistem selalu beroperasi mendekati beban penuh (putaran konstan). Metode ini dilakukan dengan cara memasang beban tiruan resistif (ballast loads atau dummy loads) pada sistem. Balast loads diatur secara otomatis sebagai kompensasi perubahan beban utama sistem, sehingga total beban sistem tetap mendekati beban penuh (putaran konstan). Untuk mengatur ballast loads bisa bekerja otomatis, pada sistem PLTMh yang menggunakan generator induksi digunakan induction generator controller (IGC), sedangkan pada sistem PLTMh yang menggunakan generator sinkron digunakan electronic load controller [7].
Untuk sekarang ini seiring dengan pertumbuhan sistem PLTMh di berbagai negara (terutama negara-negara berkembang), generator sinkron dengan kapasitas kecil mulai banyak diproduksi dan tersedia di pasaran, sehingga sedikit demi sedikit pembangunan PLTMh yang tadinya memakai generator induksi kini mulai beralih menggunakan generator sinkron. Hanya saja sistem PLTMh yang menggunakan generator sinkron masih memiliki kelemahan ketika terjadi perubahan pembebanan, pemulihan perubahan frekuensi keluaran ke frekuensi nominal agak tertunda (terlambat) dibandingkan dengan pemulihan tegangannya. Hal ini karena perbaikan tegangan pada generator sinkron yang dilakukan oleh automatic voltage regulator (AVR) bersifat elektris, sedangkan untuk pemulihan frekuensi keluarannya bersifat mekanis (berkaitan dengan putaran). Oleh karena itu aplikasi ballast loads dengan kapasitas kecil (kurang dari 10 kW) diperlukan berikut dengan alat pengaturnya, ELC.
2. Perancangan ELC
Prinsip kerja pengatur beban elektronis (electronic load controller, ELC) ini adalah ELC akan memonitor frekuensi sistem secara terus menerus. Frekuensi hasil monitor akan dibandingkan dengan frekuensi offset (nilai frekuensi yang sudah ditentukan sebelumnya sesuai dengan nilai toleransi yang diijinkan). Hasil dari perbandingan digunakan untuk mengatur besar-kecilnya ballast loads secara otomatis yakni dengan cara menambah atau mengurangi ballast loads sebagai kompensasi beban utama yang pemakaiannya tidak menentu, sehingga diharapkan total beban generator PLTMh akan terjaga pada beban aman dan putaran generator menjadi relatif mendekati putaran konstan.
Prinsip kerja pengatur beban elektronis (electronic load controller, ELC) ini adalah ELC akan memonitor frekuensi sistem secara terus menerus. Frekuensi hasil monitor akan dibandingkan dengan frekuensi offset (nilai frekuensi yang sudah ditentukan sebelumnya sesuai dengan nilai toleransi yang diijinkan). Hasil dari perbandingan digunakan untuk mengatur besar-kecilnya ballast loads secara otomatis yakni dengan cara menambah atau mengurangi ballast loads sebagai kompensasi beban utama yang pemakaiannya tidak menentu, sehingga diharapkan total beban generator PLTMh akan terjaga pada beban aman dan putaran generator menjadi relatif mendekati putaran konstan.
2.1. Perangkat Lunak ELC

Sebagaimana diperlihatkan pada Gbr.1, ELC terdiri atas beberapa blok.
A. Zero Crossig Detector
Secara sederhana Zero Crossing Detector (ZCD) didefinisikan sebagai rangkaian elektronik untuk mengubah sinyal sinusiodal menjadi persegi.
A. Zero Crossig Detector
Secara sederhana Zero Crossing Detector (ZCD) didefinisikan sebagai rangkaian elektronik untuk mengubah sinyal sinusiodal menjadi persegi.
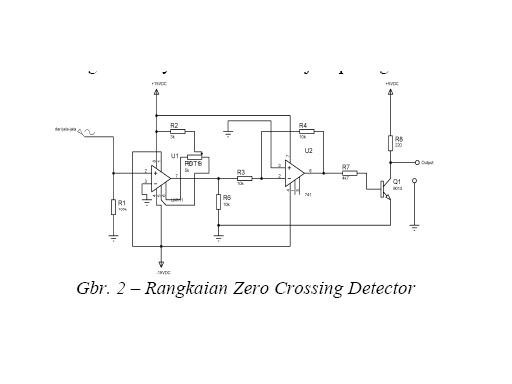
Rangkaian Zero Crossing Detector Gbr.2 diperlukan, karena mikrokontroler sebagai pengendali utama ELC hanya bisa membaca sinyal tinggi dan rendah (persegi). Oleh karena itu sumber sinyal masukan dari saluran jala-jala yang berupa sinyal sinus harus diubah menjadi sinyal persegi.
B. Pengendali Utama
Pengendali utama yang merupakan otak ELC memanfaatkan sebuah IC mikrokontroler AT89S51. Mikrokontroler diprogram untuk mengatur beban ballast loads secara otomatis berdasarkan perubahan frekuensi saluran yang dirasakannya. Adapun diagram alur yang dirancang pada pengendali utama adalah sebagai berikut :

C.Switching
Triac merupakan keluarga thyristor, yakni suatu devais yang berisi dua buah SCR yang dirangkai anti parallel. Triac mampu mengontol listrik AC gelombang penuh tanpa membutuhkan banyak komponen tambahan. Dibandingkan kontaktor, mengaplikasikan Triac sebagai komponen switching ballast loads, maka rangkaian rangkaian switching menjadi sederhana, no noise dan lebih ekonomis.

Cukup memakai empat buah Triac, maka ELC bisa dioperasikan untuk mengendalikan ballast loads sebesar kapasitas nominal generator PLTMh yakni dengan load 1 = 10 %, load 2 = 20 %, load 3 = 30 % dan load 4 = 50 % dari kapasitas nominal generator. Total kemampuan rangkain switching Gbr.4 adalah 5 kW.
Triac T10 % adalah Triac dengan seri Q4004 dimana memiliki tegangan dan arus nominal 400V/4A sehingga untuk dioperasikan pada ballast loads 10 % (500 W) akan aman. Pada T20 % dan T30 % dipilih Triac dengan seri BT137 dimana memiliki tegangan dan arus nominal 600V/8A sehingga untuk menanggung ballast loads 20 % dan 30 % (1 kW dan 1.5 kW), Triac masih mampu. T50 % digunakan Triac dengan seri BT139 dimana memiliki tegangan dan arus nominal 600V/16A sehingga untuk menanggung ballast loads (2.5 kW) juga aman. Keempat Triac tersebut diatur konduksinya oleh port keluaran mikrokontroler (P1.0, P1.1, P1.2, P1.3) yang masing-masing melalui IC Optoisolator MOC3020. IC MOC2030 dipilih karena selain keluarannya sebagai driver Triac, IC MOC3020 juga sebagai pengisolasi mikrokontroler dari tegangan jala-jala. Sehingga walaupun mikrokontroler digunakan untuk mengontrol tegangan AC 220 V, mikrokontroler tetap aman.
D. Indikator Frekuensi
Sebagai tanda pengaman untuk mengetahui PLTMh terbebani lebih (overload) atau beban lepas (loss of load), maka pada ELC dilengkapi dengan lampu indikator under/over frekuensi.

Lampu indikator frekuensi under/over Gbr.5 memakai lampu LED 12 mm. LED-LED tersebut diaktifkan melalui Q2 dan Q3 transistor PNP 9012 yang difungsikan sebagai saklar. LED akan menyala dengan memberikan bias tegangan kurang lebih sebesar 2 V dan arus sekitar 7 mA pada kaki anoda-katoda, serta kaki basis Q2 dan Q3 diberi bias rendah (low). R1 dan R3 berfungsi untuk membatasi arus LED.
E. Catudaya
Agar semua rangkaian pada alat yang dirancang bisa bekerja dengan baik maka diperlukan suplai catudaya yang baik sesuai dengan kebutuhan atau karakteristik masing-masing komponen. Untuk pengontrol utama IC AT89S51 membutuhkan supali catu daya DC +5 Volt, sedangkan IC OpAmp LM111 dan LM741 pada rangkaian ZCD membutuhkan suplai catudaya DC ganda ± 15 Volt, dan oleh karena itu diperlukan rangkaian catudaya tunggal dan ganda.

3. Hasil Pengujian
4. Ucapan Terima Kasih
Terima kasih disampaikan Bpk. M. Isnaeni dan Bpk. Sujoko Sumaryono selaku dosen pembimbing serta kepada sahabat Athhar Arrosyad yang telah berbagi ilmu mikrokontroler dan sahabat-sahabat KOMUNIKE yang telah banyak men-support dalam menyelesaikan penelitian ini.
5. Kesimpulan
Berdasarkan hasil pengujian di laboratorium dan pembahasan hasil penelitian dapat diperoleh beberapa kesimpulan sebagai berikut:
1. Aplikasi ballast loads dengan menggunakan alat pengatur beban elektronis (Electronic Loads Controller) yang terdiri atas tiga rangkaian utama: Zero Crossing Detector, Pengandali utama (Main Controller) dan Switching, dapat digunakan untuk menjadikan mutu/kualitas daya listrik sistem PLTMh lebih baik.
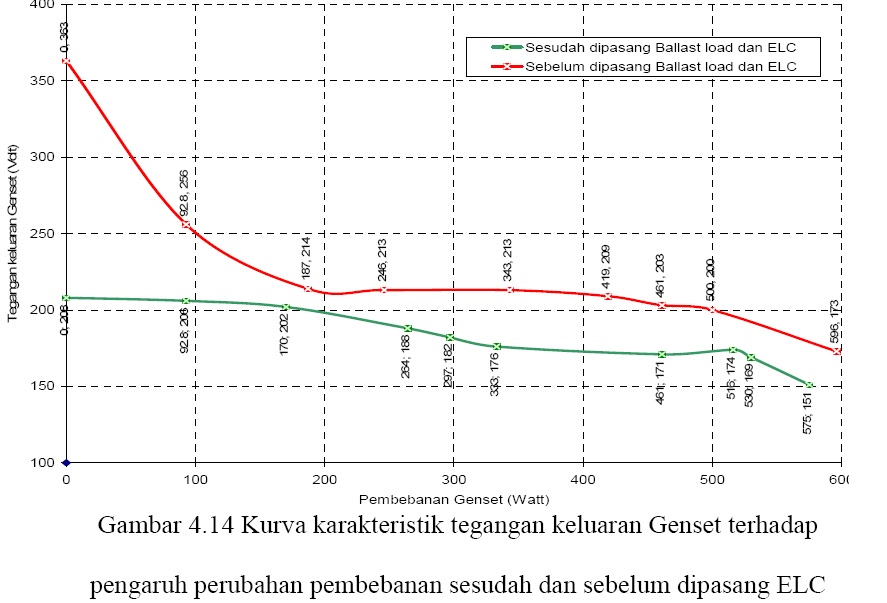
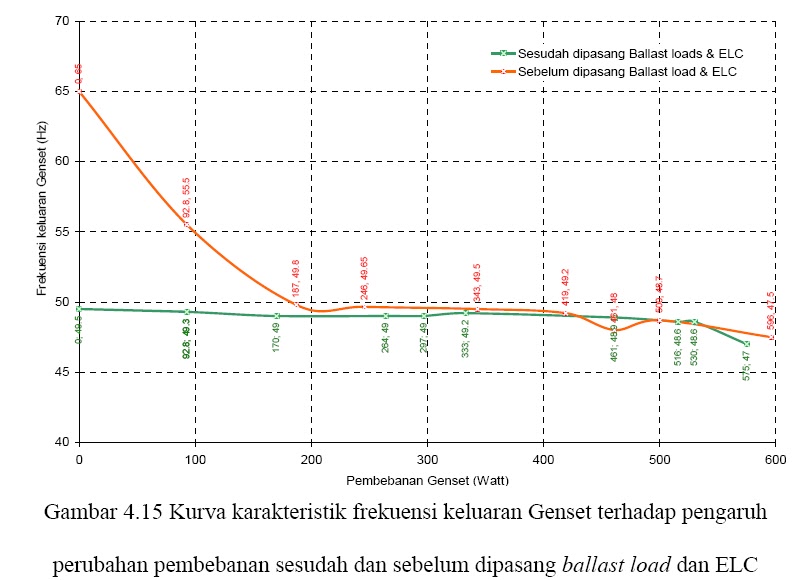
2. Selain frekuensi sistem menjadi relatif konstan, implementasi ballast load dan ELC pada sistem PLTMh dapat pula turut menjaga bahaya kenaikan tegangan sistem akibat beban ringan (underloads) ataupun saat beban lepas (no load/loss of load).
6. Referensi
[1] Fritz, J. Jack., “Small and Mini Hydropower System,” McGraw-Hill, New York, 1984.
[2] Malvino, Paul Albert., ”Prinsip-prinsip Elektronis,” Erlangga, Jakarta, 1996.
[3] Nalwan, Andi P., “Panduan Praktis Teknik Antarmuka dan Pemrograman Mikrokontroler AT89C51,” Elex Media Komputindo, Jakarta, 2003.
[4] Putra, Eko Agfianto., “Belajar Mikrokontroler AT89C51/52/55 (Teori dan Aplikasi). Edisi kedua,” Gava Media, Yogyakarta, 2004.
[5] http://epsdin.wordpress.com/2008/04/15/membangun-kemandirian-masyarakat-dan-bangsa-melalui-PLTMh/(diakses, 27/08/2008)
[6] http://energialternatif.ekon.go.id (diakses, 27/08/2008)
[7] http://www.oregon.gov/ENERGY/RENEW/Hydro/docs/MicroHydroGuide.pdf (diakses, 23/01/2008)
[8] http://www.smartdraw.com/tutorials/flowcharts/tutorial_02.htm (diakses, 22/08/2008)